文章內容

台灣拚自駕車上路!測試場域、3D高精地圖、法規同步推出~

在世界各國積極布局自駕車的現在,台灣也正在自駕車領域加緊腳步。針對自駕車急需的模擬測試與上路試驗條件,政府相關部會已經擬好初步辦法,要讓自駕車也能在台灣的道路上實際運行。
❐ 想發展自駕車,測試場域、3D高精地圖、法規缺一不可
在測試場域方面,科技部主導建置的「臺灣智駕測試實驗室」在108年2月25日正式開幕,將台灣常見的13種常見道路型式和行車情境融入模擬場域內,要讓智慧交通系統能在此測試運行,促進自駕車技術的發展。科技部自106年起,於沙崙智慧綠能科學城建置封閉式測試場域—「臺灣智駕測試實驗室」,總面積約1.75公頃,設計上以模擬國內道路情境約時速0~30公里低速行駛,提供小型車或中型巴士之自駕車於此封閉場域內進行混合車流之實境測試。場域內設有13種道路設施,以及行人、自行車、車輛等軟式測試目標物,可針對自動駕駛的主要關鍵程序:「感知」、「決策」及「控制」三方面進行全面檢驗。
而自駕車上路不可或缺的3D高精地圖繪製與收集方面,則由內政部所負責。內政部目前已經委託成功大學「高精地圖中心」負責引進國際製圖技術、提供圖資與技術諮詢與相關的國際交流合作。未來,內政部規劃將補助3D地圖測繪業者的高精地圖原始資料採集、檢核及維護費用,並制定高精地圖製圖的標準作業流程,以統一圖資格式和維持圖資品質。此外,內政部更打算授權營運商使用國際通用的「基礎版高精地圖」,讓營運商可以依據車商系統需求進行加值與轉檔,輔助自駕車的實際落地。
另外在法規方面,經濟部「無人載具科技創新實驗條例」已於107年11月30日由立法院三讀通過,並由總統於12月9日頒布。未來在自駕車上路之前,必須先取得「封閉式測試場域評估報告及相關安全規劃」,才能通過審核,正式在開放道路上進行試驗。對此,經濟部與交通部訂定了四項子法,包含「管理辦法」、「審查會議運作辦法」、「資訊公告及安全事故處理辦法」和「專用牌照申領及核發辦法」。

圖一 總統、行政院長與各部會首長參與臺灣智駕測試實驗室開幕典禮。
資料來源:科技部。
如圖二所示,為讓自駕車系統能應變台灣的道路環境,沙崙自駕車測試場域納入13種台灣常見的道路型式與行車情境,包含彎路、圓環、十字路口、T字路口、車道縮減、綠蔭、隧道、金屬鐵橋、水泥路面/橋接縫、鐵路平交道、路外停車、移動街廓、智慧候車亭等,希望藉此提升自駕車系統訓練後的實際上路適應能力。

圖二、沙崙自駕車測試場域涵蓋台灣13種常見道路型式和行車情境。
資料來源:知識力Ansforce

圖三、沙崙自駕車模擬測試場域俯瞰實景。
資料來源:知識力Ansforce。
❐ 特定區域公車與專道專車可望最早上路,自駕巴士Gbus開放民眾搭乘體驗
在2月25日臺灣智駕測試實驗室開幕當天,除了讓民眾認識實驗室設備與測試場情境設計內涵外,也邀請與會者一同搭乘自駕巴士Gbus,體驗自駕巴士自動行駛的控制能力。
Gbus是由既有公車車體改裝的自駕巴士,幕後的自駕技術團隊由豐榮客運、台灣佳光電訊、緯創資通、理立系統、星瑞林、鼎漢國際工程顧問、台灣大學所共同組成。Gbus於2018年12月21至2019年1月21日這一個月間,在水湳智慧城進行的自駕巴士試乘活動,已經累計搭乘體驗人次達5000人,累計班次達400以上。

圖四、自駕巴士Gbus台中水湳智慧城試運行路線。
資料來源:緯創資通。
❐ 3D高精地圖搭配光達,為自駕車最佳定位解決方案
如圖五所示,自駕巴士Gbus的自駕能力建構在3D高精地圖定位和光達定位的基礎之上。在已知道路街景的3D高精度圖資下,公車上裝載的4顆光達(LiDAR)也會在行進過程中擷取即時的3D位置影像,將兩者的定位資訊進行比對後,就能確定車輛在圖資中的所在位置。
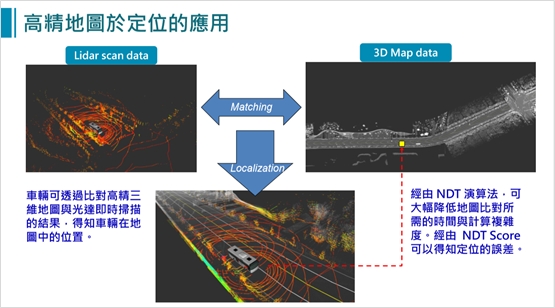
圖五、Gbus的自駕能力透過光達與3D高精地圖定位比對達成。
資料來源:緯創資通。
雖然市面上仍存在「自駕車已經裝載了鏡頭和光達(LiDAR),為什麼還需要3D高精地圖?」的雜音,但實際情況需要考量的是:(1)若自駕車不使用3D高精地圖,在光達(LiDAR)或其他感測器意外失效時,自駕車是否將驟然失去繼續行駛的能力?(2)現在大部分研發自駕車系統的目的都是為了載人,但比起同時運用3D高精地圖為自身性命買個保險的做法,有多少人願意將自己的性命壓在一台只能依賴感測器行進的自駕車上?(3)若自駕車僅依賴車上的感測器蒐集環境資訊做出行進決策,車上勢必得要裝載非常多顆的感測器,且還需要裝載一台運算能力超強的高速運算電腦(HPC)進行sensor fusion及決策。但將極耗電且體積龐大的超級電腦裝載在車上,對於希望行駛公里數越長越好,且希望同時積極減輕車體重量的電動自駕車而言,真的是一種聰明的選擇嗎?
考量以上因素並觀察各國自駕車系統的建構方法,可以發現結合3D高精地圖與自駕車感測器收集資訊的方式才是目前自駕車發展的主流。此種方法不僅可以透過定位資訊比對提高定位精準度,在任一系統意外故障時,還能保有另一重保障,讓自駕車系統不至於立即完全失效。