
English
正體中文
自駕車技術正快速發展,預估自駕車產業的產值自2019年至2026年,將自542.3億美元成長為5,566.7億美元,CAGR達39.5%。
面對自駕車技術的高速發展,台灣也已經勢在必行。立法院已於2018年11月30日三讀通過「無人載具上陸條例」,讓台灣率先成為全世界第一個通過陸海空無人載具實驗法案的國家,範圍包括自駕巴士、自駕物流車、自駕觀光船及無人機等。並且,預計在2019年6月就會由經濟部推出相關子法與配套措施,讓自駕車可以開始進行場域測試與區域的實際上路測試。
然而,自駕車要上路並非僅僅通過法規,或是單純喊喊口號就可行的,目前仍然面臨重重難關,光是一開始怎麼提供高精地圖圖資給自駕車相關業者、 怎樣處理不同高精地圖標註格式,就已經是一大問題。
在4月26日,內政部108年度無人載具高精地圖專題場次「高精地圖介接自駕車系統座談會」中,邀請了眾多研究單位學者、政府單位與業界專家,一同針對這個議題進行討論,並提出解決方案。

圖一、「高精地圖介接自駕車系統座談會」參與的專家學者
註:由左至右,分別為宏碁周豫新處長、臺大張學孔教授、成大洪榮宏教授、內政部王副司長、余宛如委員、成大江凱偉教授、MSC李平男經理、成大莊智清教授
資料來源:知識力
❐台灣高精地圖發展有譜!選定OpenDrive為標準格式
結合3D高精地圖與自駕車感測器收集道路資訊的方式,已經成為自駕車系統發展的共識。此種方法不僅可以透過定位資訊比對提高定位精準度,在任一系統意外故障時,還能保有另一重保障,讓自駕車系統不至於立即完全失效。
不過,供自駕車上路行駛所需的3D高精地圖,與我們平時在用的Google導航地圖很不相同,除了2D和3D的差別外,一般導航地圖只需要標註整條大馬路的中線位置,讓我們知道方向該往哪裡去即可;但自駕車所使用的高精地圖,至少要能夠標註出單一車道的中間位置,才能夠讓自駕車可以安全無虞地行使在道路上不致發生車禍。意即,在一般使用導航的情境下我們能夠容許公尺級的誤差,但在自駕車的世界裡,卻只能容許公分等級的誤差。
而就自駕車所需的區域動態地圖來說,如圖二所示,可分為四種圖層,第一層為Permanent static data,是地圖的最基礎層;第二層為Transient static data,多涵蓋了路標與路旁的交通號誌資訊等:第三層為Transient dynamic data,涵蓋路燈號誌、塞車狀況、車禍等資訊;第四層Highly dynamic data,涵蓋與其他車子間的行車關係、附近的行人資訊等。整體而言,最底層以靜態地圖為基礎,越往上層涵蓋的動態訊息越多。
其中,目前在自駕車領域最被重視的,其實就是最底層的靜態圖資,為高精地圖的基礎,目前台灣高精地圖中心已選定OpenDRIVE為標準格式,並打算進一步開放讓相關業者將其轉換為NDS(Navigation Data Standard)、DMP等其他格式,以提供給多元的自駕車客戶使用。
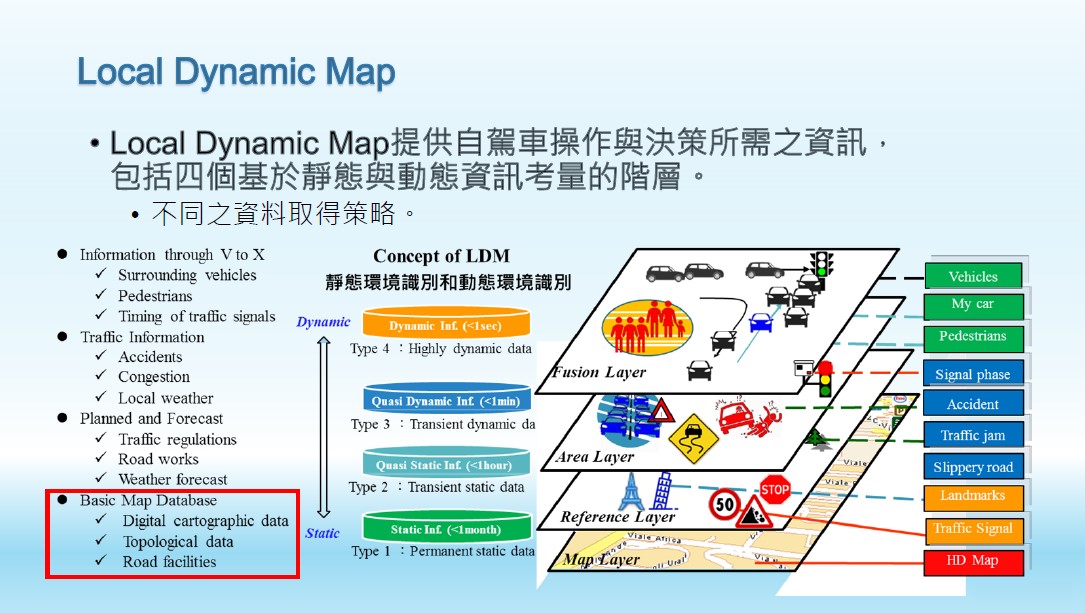
圖二、區域動態地圖資訊
資料來源:成功大學洪榮宏教授
❐ 高精地圖為什麼需要選定統一標準格式?
由於不同的測繪車,採用不同的格式進行圖資採集,可能會出現明明是同區域資料卻重複採集,僅僅只是資料格式不同的情況。為避免這種資源浪費的情形,內政部制定高精地圖標準,提供高精地圖統一規範,以協助高精地圖圖資蒐集,並且希望透過格式標準化,建立地圖測繪業者與自駕車廠商明確規格的資料供需關係,提供轉換程式發展的一致性參考,讓測繪廠商和自駕車廠商也可依此配套發展應對策略。
又不同規格之規定內容不同,軟體支援度也不相同,資料的格式若是越多,資料規格間的轉屬轉換程式就越多,發展成本也越高。為同時節省發展成本又提高圖資的流通性,高精地圖中心除了選定好標準格式外,未來還會開放圖資給合作業者進行格式轉換,透過標準化圖徵編碼及解讀,轉換成NDS、DMP等格式,以滿足各種自駕車業者需求。
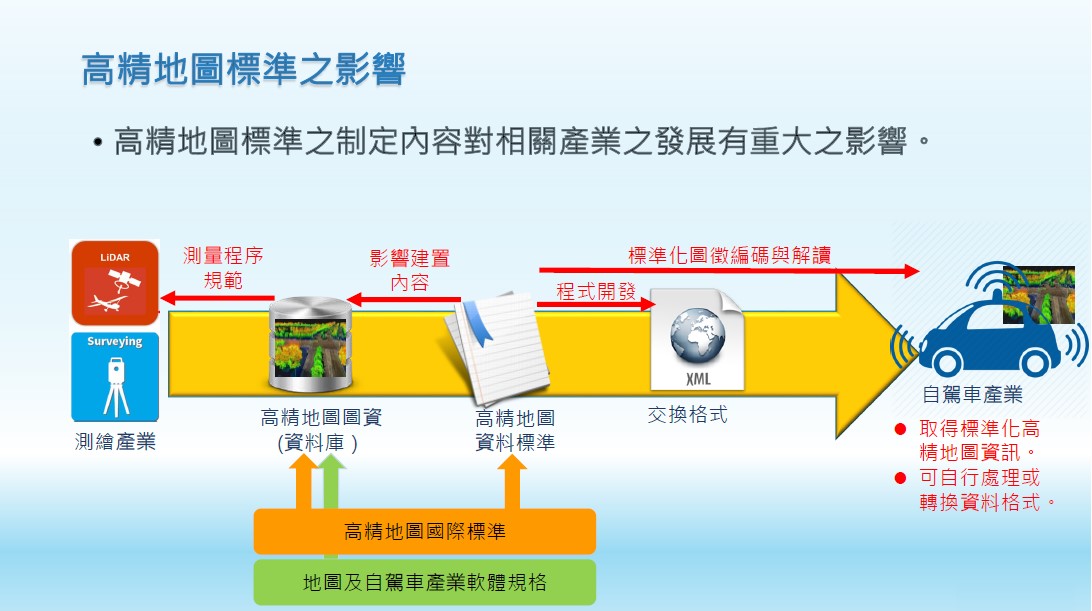
圖三、高精地圖標準制定的影響
資料來源:成功大學洪榮宏教授
❐ 為什麼選擇OpenDRIVE?
關於高精地圖格式,業界有比較通用的兩種,一種是NDS(Navigation Data Standard),一種是OpenDRIVE,此外還存在一些其他的規範格式。
OpenDRIVE是一種開放的格式規範,用於描述道路的網路邏輯,以促進不同駕駛模擬器之間的數據交換。初始版本是2005年的0.7版本,截至2019年4月,當前最新的版本是1.5版。OpenDRIVE文件格式提供XML格式、層次結構、道路幾何的分析定義(平面要素,高程,橫坡,車道寬度等)、各種類型的車道、車道的邏輯互連、標誌和信號、路面屬性、道路和路邊物體等。
NDS(Navigation Data Standard)是一個是由汽車製造商和供應商聯合創建的汽車導航資料庫標準格式,NDS本身也代表由這些供應商在德國註冊的協會。參加NDS會員的,包含汽車製造商BMW、Renatlt、Daimler、Volkswagen、Hyundai、Nissan,以及相關零組件/應用服務商如Bosch、Denso、Mitsubishi、Garmin、高德地圖等。
台灣高精地圖中心決定選用OpenDRIVE高精地圖製作標準,主要原因是高精地圖圖資由政府單位提供是最好的選擇。OpenDRIVE除了是適用高精地圖的資料國際標準外,使用高透明度的XML編碼流通,且完全免費對外開放,對於政府單位而言,能與國際主流標準格式接軌,又能避免存在圖利任何廠商的嫌疑,一舉多得。尤其是台灣未來自駕車將以自駕巴士、公務車、物流車等先行上路,採用OpenDRIVE,將會比採用主要都是歐洲車廠主導的NDS標準,或是日本廠商主導的DMP標準,都更加客觀、不易被質疑。

圖四、高精地圖發展現況
資料來源:成功大學洪榮宏教授

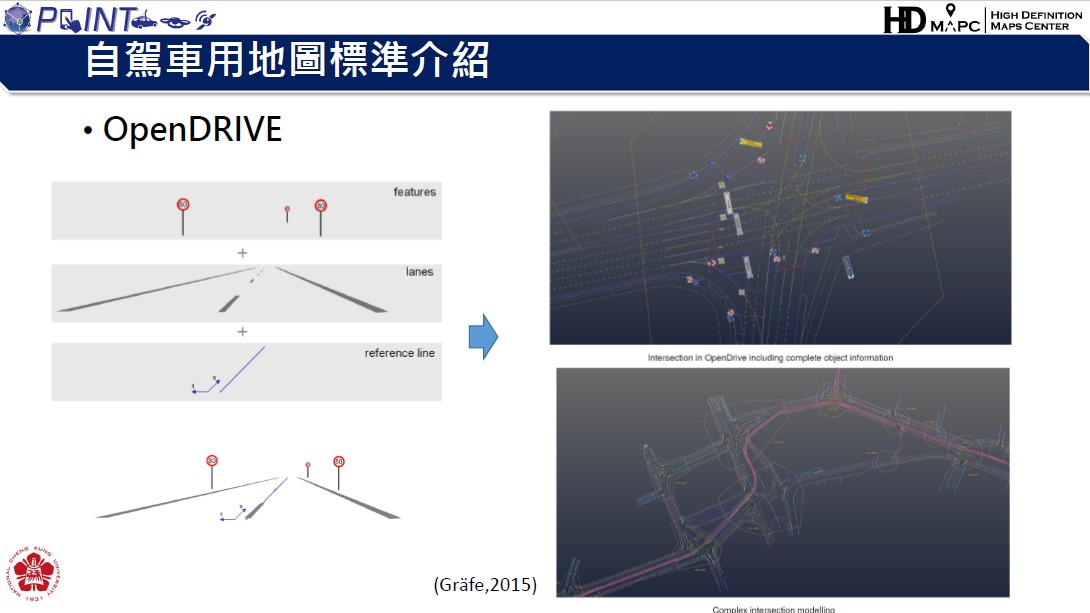
圖五、OpenDRIVE之規劃類別
資料來源:成功大學洪榮宏教授
雖然OpenDRIVE標準已包含車道、路口、車道標線、道路設施、交通號誌等,但我們仍能自圖六看出,OpenDRIVE的標示方式在某些情況下略偏簡約,且台灣有很多路上的標線在OpenDRIV等國際標準中其實是找不到的,而這些都還有賴相關配套標準建立及圖資營運商的加值,以符合自駕車在台灣實際上路的需求。
圖六、OpenDRIVE地圖標準圖示
資料來源:成功大學江凱偉教授
❐ 除了高精地圖外,自駕車發展仍面臨多項挑戰
除了以上所提到的高精地圖外,目前自駕車技術的發展其實還面臨許多挑戰,包含平台的資訊傳遞是否夠及時、運算電腦的電力與空間限制、不同感測器之間的資料同步、不同天候情境對感測器的影響、如何在控制成本下建構有效的自駕車模擬平台,以及如何有效地車輛整合和設定安全機制,這些都還有賴諸多相關機構和廠商的持續努力。








