
English
正體中文
台灣對於協助自駕車上路的高精地圖發展,已經勢在必行!在3維高精地圖繪製與收集方面由內政部負責統籌,內政部今年委託成功大學成立「高精地圖研究發展中心」,負責制定高精地圖標準、引進國際製圖技術、建立產學研交流平台,要讓高精地圖在台灣落地生根並開花結果。
圖一 內政部委託成功大學成立「高精地圖研究發展中心」。
資料來源:知識力Ansforce。
然而,高精地圖和一般我們用的導航地圖有何不同?為何重要?台灣的高精地圖現在進展到什麼程度?未來又將往哪方面發展?以下讓我們針對這些問題一一探討。
一、高精地圖與一般的導航地圖有何不同?
現在已有導航地圖了,為何還需要高精地圖呢?我們常在使用的一般導航地圖(如Google地圖),只能標示出我們正行走在哪條路上,等一下該走哪條路,卻無法標註各路段的每一個車道和即時的精準地圖位置。又現有的一般導航地圖仰賴的GPS定位,定位誤差可從數十公分至數百公尺這麼多,這也是為何有時使用Google地圖導航會有定位突然飄移的現象。但同樣的狀況若是套用在自駕車上,這樣公尺等級的定位誤差將造成嚴重的車禍事故,是絕對無法容忍的,這也是發展高精地圖之所以這麼重要的原因。
要實現自駕車全自動的境界,「定位點」至關重要,這將決定車子如何判斷附近有東西正在靠近,下一秒該往哪裡去。且這些「定位點」誤差值必須要很小,必須要縮小至公分等級,才能確保自駕車的安全性。這也是為什麼決定「定位點」的「高精地圖」概念在近年不斷被提出,並且持續受到市場高度關注。
此外,高精地圖和一般導航地圖另一個不同點是,一般導航地圖(如Google地圖)都是給人看的,而高精地圖卻是提供給機器看的,所以高精地圖會提供車道中心線、路面線、交通號誌、車道坡度與曲率等資訊,有助於提高機器系統的辨識和判斷力,但這麼多的資訊對人類而言卻反而是一種負擔,只會混淆人類的判斷能力。

圖二 高精地圖與一般導航的圖的差異。
資料來源:高精地圖研究發展中心。
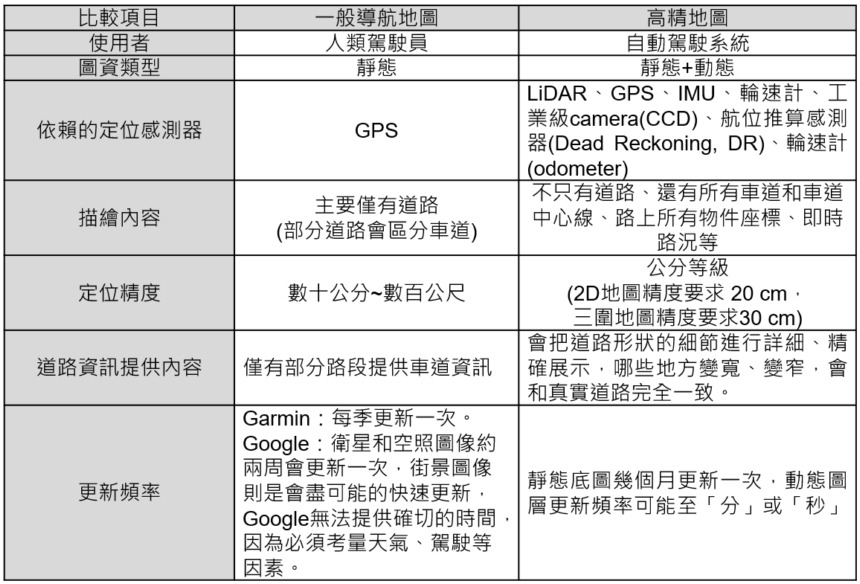
表一 一般地圖與高精地圖之比較。
資料來源:高精地圖研究發展中心,知識力Ansforce整理。
二、高精地圖為什麼重要?
什麼是高精地圖?高精地圖(High Definition Map, HD Map)簡單來說,就是一種定位精度更高、能提供資料內容更豐富的電子地圖,主要是提供給自動駕駛車輛在路上行駛所使用。在精度要求上,高精地圖要求要達到「公分」等級,以用來描述道路上所有需要注意的細節,主要包含車道線的位置、類型、寬度、坡度和曲率,以及交通號誌、紅綠燈、人行道及道路幾何特徵等。
為什麼需要高精地圖?高精地圖的發展,其實都是為了布局未來自駕車上路所做的準備。先進駕駛車輛安全研究已表示,想要提升自動駕駛層級,必須結合高精地圖的效益。至於高精地圖能夠提供怎樣的效益?我們可以先從沒有高精地圖輔助的反例狀況了解起。
在2016年7月,於美國佛羅里達州發生一起因Model S車主使用Tesla「自動駕駛系統(Autopilot)」而發生的死亡車禍,成為全球首起Autopilot自駕車系統死亡事故。探究事故發生原因,是因為在日照過於強烈的當下,Model S的Camera無法分辨全白的貨車車體與強光下的天空,造成自動駕駛系統未能辨識前方有障礙物並自動剎車。事故發生後,讓大家重新審視自駕車只搭載Camera的弱點。在此例中,若車體能搭載光達或納入動態地圖資訊,都可望能夠避免這樣的事故再次發生,將能保障自駕車系統或駕駛有足夠的應變時間。
高精地圖的重要性,在於它能輔助自駕車進行定位和導航。結合3維高精地圖與自駕車感測器收集道路資訊的方式,現在已經成為自駕車系統發展的共識。透過此法,不僅可以提高定位精準度,在任一感測系統故障時,還能保有另一重保障,讓自駕車系統不至於完全失效。畢竟不同類型的感測器都有其感測的弱點和極限,自駕車系統在融合各種感測器數據進行決策時,也需要一套監督機制確認各個感測器是否正常運作,才能嚴防誤判的狀況發生。若有高精的圖的輔助定位、導航,除了有助於減少誤判外,甚是可以降低對於感測器的依賴程度。
三、高精地圖要求:平面精度須達到20 cm,三維精度須達到30 cm
依據德國賓士的實驗,他們認為自駕車要在路上跑,至少需要車道寬度一半的精度水準。以一般道路而言,車道的寬度為3公尺,則所需精度為1.5公尺。而在ADAS領域,對導航圖資的精度水準也有更進一步的定義,我們目前的導航地圖,精度水準是在「Which Road」的階段,可以知道我們正行走在哪條路上,但是通常看不到更詳細的車道資訊,僅在少數路段才會顯示路上到底有幾條車道。未來,我們短期的目標是要達到「Which Lane」的層級,定位精度達到1.5公尺,這看起來不是太精確的數值,在市區已經是很難達到的數值。而中期而言,我們的目標是要達到「Where in Lane」的層級,也就是車道間的定位精度,定位精度要求為50公分,這也是現在自駕車經常討論的定位精度目標。
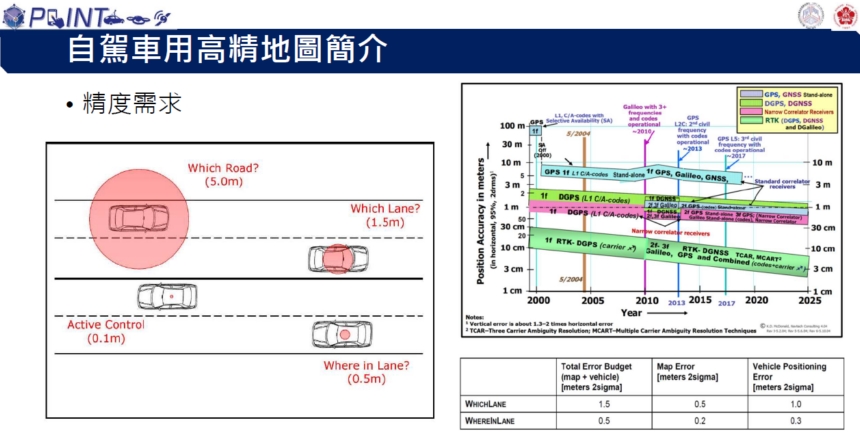
圖三、自駕車用高精地圖短期與中期的精度目標。
資料來源:高精地圖研究發展中心。
我們可以把短期目標的「Which Lane」精度目標進行細分,細分為對平面圖資的精度要求50公分,汽車自帶導航系統精度要求1公尺;同理中期目標的「Where in Lane」也可細分為對平面圖資的精度要求20公分,以及汽車自帶導航系統精度要求30公分。而平面精度達到20 cm,三維精度達到30 cm的精度要求,正是現在自駕車經常討論的精度水準,也是台灣高精地圖檢核的標準。
表二 從目前Which road走向Which lane、Where in lane目標的精度要求。
資料來源:高精地圖研究發展中心,知識力Ansforce整理。

四、台灣高精地圖將採「車載行動測繪系統」和「群眾外包」兩種模式進行動態及靜態圖資採集
台灣高精地圖的數據收集,未來將會仰賴群眾外包和車載行動測繪系統兩種模式來完成。前者搭載的是較便宜的車載光達和感測器,成本需求會較低;後者搭載的會是專用於圖資收集的設備,成本較為高昂。
整體而言,台灣的高精地圖將會同時採用兩種模式來進行靜態與動態圖資建置與更新。因為高精地圖的圖資建置需要經過一系列QC(Quality Control)品質查核程序,因此在第一層的靜態底圖方面,將會採搭載專業設備的測繪車來進行建置,未來在動態圖層或是數據更新的時候,再搭配群眾外包模式來完成。又「群眾外包」其實指的是透過測繪車以外的自駕車系統協助圖資的更新,包含搭載較低成本的車載光達、Mobileye ADAS系統的自駕車,就屬於此類,可視為是一種Outsourcing的概念。
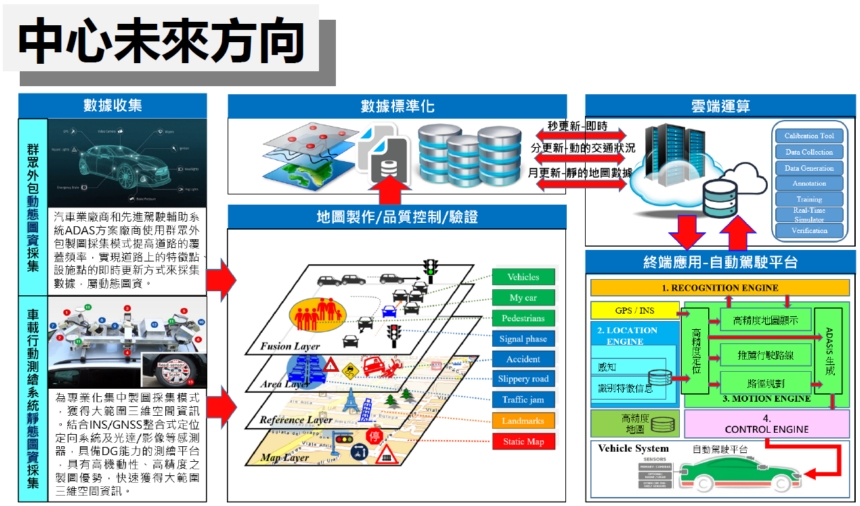
圖四 台灣高精地圖將採用測繪車和眾包兩套系統進行建置。
資料來源:高精地圖研究發展中心。
靜態高精地圖需透過專業的設備建置,以確保符合高精地圖的品質標準,預計未來更新頻率將會採每季更新一次;而動態圖層的建置或更新,採用群眾外包模式的效率才能夠提高,更新頻率才夠快,未來有些動態圖層要求更新頻率為分,有些即時的動態資訊甚至可能要求更新頻率至秒。雖然群眾外包模式採用的感測器較便宜,但在運作過程中已有高精地圖的輔助,所以即使是在GPS訊號比較差的地方,它的定位精度仍然是被保證的。
這個道理在於,高精地圖靜態底圖已經完成路上物件和地理坐標的配對建置,所以即使沒有GPS訊號,只要自駕車上搭載的Camera可以辨識出路上的物件,就可以比對高精地圖資料庫中的物件坐標位置,進行定位與資訊更新;同理,若自駕車上搭載光達,透過光達測出車體與物件之間的距離,就可以進行車體位置的定位。
目前臺灣的車載行動測繪系統,除了內政部國土測繪中心外,還有5家測繪業者也可以提供建置高精地圖,分別是詮華國土測繪、自強工程顧問、中興測量、勤崴國際科技、經緯航太,他們都已具備生產高精地圖的能力和經驗。

圖五 台灣有能力提供測繪車的廠商。
資料來源:高精地圖研究發展中心。
五、內政部地政司已完成高精地圖圖資標準與驗證指引
臺灣要求之高精地圖,平面精度須達到20公分,三維精度須達到30公分。目前內政部地政司已經完成高精地圖圖資標準格式的設計,選擇「OpenDRIVE + Extension」作為台灣高精的圖的格式。而「OpenDRIVE + Extension」的意涵是,在選定OpenDRIVE為主要格式後,再針對許多台灣本土POI(Point of Interesting)但在原始OpenDRIVE格式裡沒有定義到的加以定義,形成補充「Extension」,以符合臺灣的用路需求。
其中,OpenDRIVE本身並不是唯一的高精地圖格式,地政司選擇採用OpenDRIVE,重點是要把它定義為中間的交換檔,而不是把它定義為終端的使用格式。現行高精地圖的格式有非常多種,包含OpenDRIVE、OpenDRIVE的延伸(如百度Apollo)、同樣從OpenDRIVE延伸變化出來Autoware、歐洲車廠主要支持的NDS、日系車廠支持的DMP等。
內政部地政司選擇OpenDRIVE背後兩大原因:(1)因為是開放的架構,沒有權利金的問題,若選擇NDS或DMP格式,未來會產生權利金支付的問題(2)因為OpenDRIVE目前與Autoware、NDS、DMP等格式都有轉換工具,所以採用OpenDRIVE可以不必顧慮使用者終端所採用的格式,只要開放這些圖資,並確保這些圖資可以讓自駕車相關業者自行轉換為所需的格式即可。因此,只要建置好、管理好中間檔,就可以協助眾多自駕車相關業者,促進這個產業持續發展。
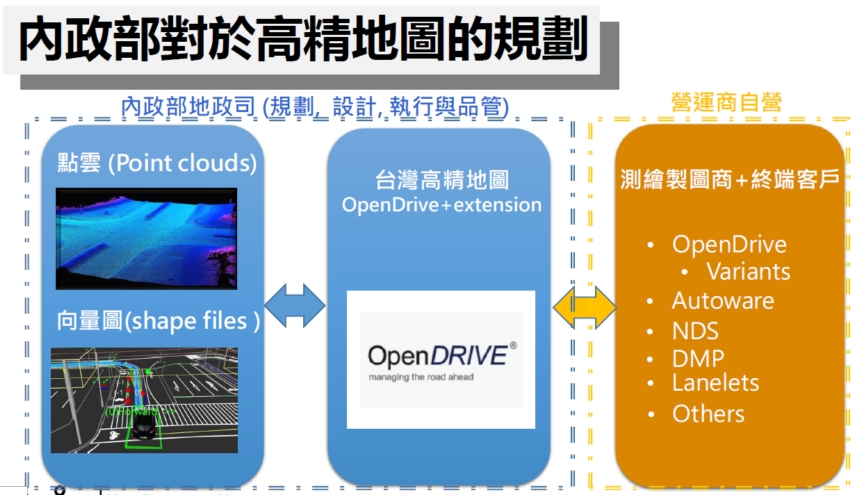
圖六 內政部地政司選定OpenDrive並將其定義為中間的交換檔。
資料來源:內政部地政司/高精地圖研究發展中心。
在國外,高精地圖的格式大多由車廠來主導(如歐洲和日本),臺灣則是由內政部地政司扮演高精地圖格式制定的角色,其主因還是臺灣缺乏強大有主導力的車廠所致。像是歐洲的NDS、日本的DMP,這樣的終端格式都是各家廠商把持的機密,不對外公開。
若要找一個和地政司發展方向類似的範例,可以參照Autoware的做法。如圖七所示,Autoware可以支援日本、TomTom和OpenDRIVE的格式,讓使用者依據需求進行格式轉換。
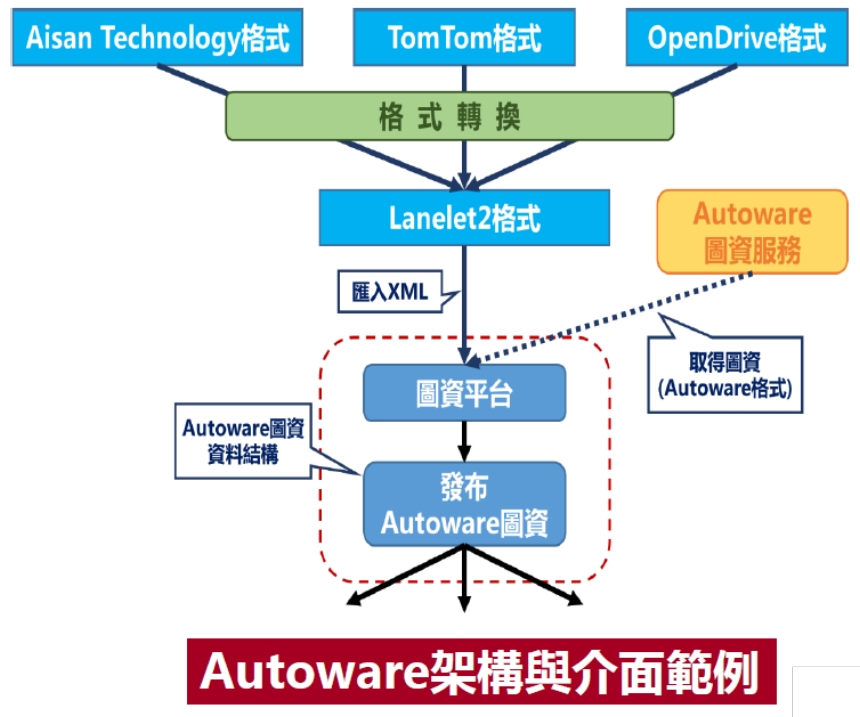
圖七 Autoware的架構與介面範例。
資料來源:內政部地政司/高精地圖研究發展中心。
此外,內政部地政司已完成高精地圖驗證指引(草案),包含工作項目、精度、交付內容等,同時要求自駕車用地圖需達平面20公分及三維30公分以上之精度、所有地圖資訊都需在三維空間中呈現、真實世界中的特徵物皆需明確定義於地圖中、自駕車用地圖使用的尺度必須與真實世界一致、必須提供即時地圖資訊供車輛進行駕駛決策等,以確保業者在高精地圖產製都有符合精度需求,並遵守臺灣高精地圖圖資標準格式,把關圖資的品質和內容。
表三、自駕車用地圖驗證精度流程指引。
資料來源:內政部地政司/高精地圖研究發展中心,Ansforce整理。

針對台灣兩大自駕車測試場域,台南沙崙測試場域高精地圖演進會較台中水湳要快。沙崙測試場域高精地圖自2018年推出,內政部、經濟部和亞洲矽谷的版本後,2019年版的內政部台灣高精地圖格式(OpenDRIVE + Extension)已經於9月底完成,2019年的終端使用者格式範例(Autoware)也預計將於11月底完成。而之所以會先鎖定Autoware作為使用者格式範例,是因為臺灣之自駕車系統以Autoware使用者居多。
內政部地政司對於高精地圖的規劃包含了圖車合一驗證,由地政司研擬高精地圖圖資內容標準、高精地圖驗證指引運用於沙崙場域,同時搭配不同自駕車平台,目前已經有23個合作夥伴。目標是建立臺灣高精地圖OpenDRIVE與特定自駕車圖資格式Autoware轉換示範工具,並且持續修正圖資內容。
六、自駕車運作的挑戰
目前自駕車導航安全性面臨的挑戰,包含多變的操作環境(白天、晚上景色差異大)、其他用路者的干擾、來自不同國家自駕車製造商缺乏標準化的規格設計、市場充斥大量良莠不齊的感測器生產者並缺乏相關認證機制、不同的自駕車設計與不同的道路安全法規等。另外像是GPS的定位也是一大問題,因為GPS的定位會因為建築物的反射造成飄移,自數十公分至數百公尺都有可能,這對自駕車業者而言是很大的挑戰,目前大家都正在試圖解決這項問題。
此外,目前包含Google和Garmin等國內外圖資,在開機時都會有免責聲明,強調責任還是會回歸到駕駛本身,畢竟GPS也會有故障的可能性。但未來到了高精地圖時代,這樣廠商用於自保的免責聲明還能適用嗎?這些都是未來可能必須面對的問題。
在108年10月28日(一),高精地圖研究發展中心將於台北福華文教會館舉辦「2019自駕車用高精地圖國際研討會」,持續更新臺灣高精地圖的發展現況,就車圖合一、動態地圖等議題相互交流,並邀請有興趣的產業界一同參與討論。








